Расчет рычага в механике
Выбор электродвигателя
Подъем, осуществляется за счет перемещения гайка по вращающемуся винту, который в свою очередь приводится в движение от электродвигателя через ременную передачу.
Определяем потребляемую мощность привода (мощность на выходе) по формуле (16).
Рвых = Ft* V, (17)
где Ft — окружная сила на винте, Н, принимаем Ft = 1500 Н;
V — скорость подъема, м/мин.
Рвых = 1500 * 1,7 = 2550 Вт
Определяем потребляемую мощность электродвигателя по формуле:
Рэ.потреб = Рвых/зобщ, (18)
где зобщ — общий КПД механизма:
зобщ = зв.п* зр* зп, (19)
где зв.п — КПД винтовой передачи;
зр — КПД ременной передачи;
зп — КПД подшипников.
зобщ = 0,5 * 0,96 * 0,99 = 0,48
Рэ.потреб = 2550/0,48 = 3438 Вт = 3,4 кВт
Определяем потребную частоту вращения вала двигателя:
здв = зв* u, (20)
где u — передаточное число ременной передачи.
Передаточное число ременной передачи.
dэл/dв = u
1000/180 = 5,5
здв = 167 * 5,5 = 935 мин-1
После проведенных расчетов выбираем два асинхронных электродвигателя серии АИР90 — L6У3 (закрытые обдуваемые) со следующими параметрами:
· мощность Р = 1,5 кВт;
· синхронная частота вращения ротора n = 935 мин-1.
Расчет рычага
Рычаг работает на изгиб, поэтому необходимо произвести расчет на изгиб и определить ее размеры.
Определение площади поперечного сечения рычага.
Необходимо найти момент сопротивления по формуле:
W = Мизг.maх/ [уизг], (21)
где Мизг.maх — максимальный изгибающий момент;
[уизг] — допускаемое напряжение на изгиб, МПа.Принимаем профиль поперечного сечения прямоугольный (рисунок 18) с отношением h/b = 1,5.
Рисунок 18 — Профиль поперечного сечения рычага
Для определения максимального изгибающего момента составим расчетную схему (рисунок 19).
Сила Р определяется по формуле:
Р = G*q /4, (22)
где G — грузоподъемность подъемника, кг.
Р = 3000*9,81/4 = 7,5 кН
Расстояние l принимаем конструктивно:
l = 1240 мм.
Определяем изгибающие моменты:
М = Р * l (23)
М = 7,5 * 1,24 = 9,3 кН*м
Рисунок 19 — Эпура Мизг
Определяем допускаемое напряжение на изгиб по формуле:
[уизг] = ут/К3, (24)где ут — предел тягучести для стали Ст3, МПа;
К3 — коэффициент запаса прочности.
[уизг] = 240 / 10 = 24 МПаПолученные значения подставляем в формулу (20):
W = Мизг.maх/ [уизг] (25)
W = 386300 / 24 = 16096 мм3 = 1609 см3
Согласно момент сопротивления для балки прямоугольного сечения равен:
W = (bh)2/6 (26)
В нашем случае для прямоугольного профиля коробчатого сечения формула (23) примет следующий вид:W = (b — 2t)*(1,5b — 2t)2/6, (27)
где t — толщина стенок, t = 0,8 см.
Зная значение W, решим полученное уравнение.
Получаем значения: b = 12 см, h = 12 см.
Расчет цепной передачи
Проектный вариант
Определяем число зубьев ведущей звездочки z1 и z2 принимаем передаточное число цепной передачи Uцп= 1:
Z1 = 27 — 2*Uцп= 29 — 2*1 = 25,
Z2 = Z1 = 27.
Определяем главный параметр цепи это ее шаг:
Р1 = 2,8*3vТ2*103*Кэ / m* z1*[Рц], (28)
где Т2 — вращающий момент на ведущей звездочке, н*м;
z1 — число рядов в цепи;
m = 1,0 (цепь однорядная роликовая типа ПР);
Кэ — коэффициент эксплуатации.
Кэ = Кд* Кс* К?* Крег* Кр, (29)
где Кд — коэффициент динамической нагрузки;
Кс — коэффициент, зависящий от способа смазывания Кс = 1,25 (периодически);
К? — коэффициент зависящий от положения передачи К? = 1,15;
Крег — коэффициент регулирования межосевого расстояния Крег = 1,25;
Кр — коэффициент, зависящий от режима работы Кр = 1,0.
Кэ = 1,0 * 1,5 * 1,15 * 1,25 * 1,0 = 2,156
[Рц] — допускаемое давление в шарнирах цепи зависит от частоты вращения ведущей звездочки и ожидаемого шага цепи Рmin = 12,7 — 15,875 мм.Поэтому шаг цепи равен:
Р1 = 2,8*3v13*103 * 2,156 / 1,0 * 25* 31 = 19,0
Принимаем стандартное значение Р = 19,05; цепь ПР — 19,05.
Определяем оптимальное межосевое расстояние а1, мм.
а1 = (30 — 50) * Р, (30)
где Р — стандартный шаг цепи, мм.
Тогда межосевое расстояние ар1 = 40 мм.
Определяем число звеньев цепи:
lр1 = 2 * ар1 + (z1 + z2) / 2 (31)
lр1 = 2 * 40 + (25 + 25) / 2 = 105
Уточним межосевое расстояние:
а = 0,25 * Р * (lр1 — 0,5 * (z1 + z2)), (32)
где Р — стандартный шаг цепи;
lр1 — число звеньев в цепи.
а = 0,25 * 19,05 * (105 — 0,5 * (25 + 25)) = 309,56 мм,
Учитывая, что ведомая ветвь цепи должна провисать примерно на 0,01 * а мм, а = 0,01 * 309 = 3,09 мм., при монтаже нужно предусмотреть возможность уменьшения межосевого расстояния а на 0,005 * а. следовательно, монтажное расстояние ам = 0,995 * а = 307,455 мм.
Определяем длину цепи:
l = lр1 * Р, (33)
где Р — стандартный шаг цепи;
lр1 — число звеньев в цепи.
l = 105 * 19,05 = 2248 мм
Определяем диаметры звездочки. Диаметр делительной окружности равен:
dd1 = Р / sin (180/ z1) (34)
dd1 = 19,05 / sin (180 / 25) = 156 мм
Диаметр окружности выступов:
D1 = Р * (К + Кz — 0,31 / л), (35)
где К — коэффициент высоты зуба К = 0,7;
Кz — коэффициент числа зубьев;
Р — стандартный шаг цепи;
z1 — число рядов в цепи.
Кz = ctg 180 / z1 (36)
Кz = ctg 180 / 25 = 8
где л — геометрическая характеристика зацепления:
d — диаметр ролика шарнира цепи d = 5,94 мм.
л = Р / d1 (37)
л = 19,05 / 5,94 = 3,2
Отсюда получаем что диаметр окружности выступов равен:
D1 = Р * (К + Кz — 0,31 / л) (38)
D1 = 19,05 * (0,7 + 8,0 — 0,31 / 3,2) = 164 мм
Диаметр впадин равен:
Df = dd1 — (d1 — 0,175 * v dd1) (39)
Df = 156 — (5,94 — 0,175 * v 156) = 152 мм
Проверочный расчет
Проверяем частоту вращения ведущей звездочки.
n1 ? [n];
где [n] — допускаемая частота вращения;
Р — стандартный шаг цепи.
[n] = 15 * 103/ Р (40) [n] = 15 * 103/ 19,05 = 787 мин-1n1 = 172 мин-1? [n] = 787 мин-1.
Проверяем число ударов цепи о зубья звездочек:
х ? [х];
где [х] — допускаемая частота вращения, мин-1;
Р — стандартный шаг цепи, мм.
[х] = 508 / Р (41) [х] = 508 / 19,05 = 27х = 4 * z1 * n1 / 60 * lр1, (42)
х — расчетное число ударов цепи;
n1 = 172 мин-1;
lр1 — число звеньев в цепи;
z1 — число рядов в цепи.
х = 4 * 25 * 172 / 60 * 105 = 2,4 ? [х] = 27
Определяем фактическую скорость цепи:
V = z1 * Р * n1 / 60 * 103, (43)
где z1 — число рядов в цепи;
Р — стандартный шаг цепи;
n1 = 172 мин-1.
V = 25 *19,05 * 172 / 60 * 103 = 1,36 м / с
Определяем окружную силу, передаваемую цепью:
Ft = Р1 * 103 / V, (44)
где V — фактическая скорость цепи, м / с.
Ft =2,55 * 103 / 1,36 = 1875 Н,
Проверяем давление в шарнирах цепи:
Рц = Ft * Кэ / А ? [Рц], (45)
где А — площадь проектной опорной поверхности шарнира А = 205,8 мм2;
[Рц] — допускаемое давление [Рц] = 23 Н/ мм2;Ft — окружная сила;
Кэ — коэффициент эксплуатации.
Рц = 1875 * 2,156 / 205,8 = 19,6 н / мм2 ? [Рц] = 23 Н / мм2,
Следовательно, цепь пригодна.
Проверяем прочность цепи по условию:
S ? [S]
где [S] — допускаемый коэффициент запаса прочности [S] = 8,0;
S — расчетный коэффициент запаса прочности.
S = Fр / (Ft * Кд) + (Fо * Fv), (46)
Fр — разрушающая нагрузка Fр = 138000 Н;
Ft — окружная сила, передаваемая цепью Ft = 1875 Н;
Кд — коэффициент динамической нагрузки Кд = 1,0;
Fо — предварительное натяжение цепи.
Определяем предварительное натяжение цепи:
Fо = Кf * q * a * g, (47)
где Кf — коэффициент провисания Кf = 6,0;
q — масса 1 килограмма цепи q = 1,9 кг/м;
a — межосевое расстояние a = 0,763 м;
g — ускорение свободного падения g = 9,81 м/с2.
Fо = 6,0 * 1,9 * 9,81 * 0,763 = 85 Н
Определяем натяжение цепи от центробежных сил:
Fv = q * (V)2, (48)
где Fv — натяжение цепи от центробежных сил;
q — масса 1 килограмма цепи q = 1,9 кг/м.
Fv = 1,9 * (1,36)2 = 6,5 Н,
Отсюда следует что расчетный коэффициент запаса прочности равен:
S = Fр / (Ft * Кд) + (Fо * Fv) (49)
S = 138000 / (1875 * 1,0) + (85 * 6,5) = 70 ? [S]
Определим силу давления цепи на вал:
Fв = (Кв * Ft) + (2 * Fо), (50)
где Fв сила давления цепи на вал;
Кв — коэффициент нагрузки вала Кв = 1,05;
Ft — окружная сила, передаваемая цепью Ft = 1875 Н;
Fо — предварительное натяжение цепи.
Fв = (1,05 * 1875) + (2 * 85) = 2139 Н,
Подбор подшипников
Учитывая возможность неточности монтажа, применяют радиальные, самоустанавливающиеся сферические подшипники.
Т.к. оба кольца подшипника, установленного внутри вала редуктора вращаются совместно, расчет этого подшипника будем производить по статической нагрузке, равной реактивной силе в опоре барабана от номинального груза.
Определяем эквивалентную нагрузку:
Рэ = Fа * Кб * Кт, (51)
Кб — коэффициент безопасности;
Кт — температурный коэффициент:
Рэ — эквивалентная нагрузка Н.
Рэ = 12411,76 * 1,7 * 1 = 21099 Н
Выбираем подшипник 1311 ГОСТ 5720 — 75 с внутренним диаметром 55 мм, наружный диаметром 120 мм, шириной 29 мм, и статической грузоподъемностью 22500 Н. для повышения унификации конструкции для опоры В принимаем аналогичный подшипник.
Расчет фундаментного болта
Материал фундаментного болта — сталь 35. фундаментный болт показан на рисунок №13. фундаментный болт рассчитывается на растяжение с учетом предварительной затяжки, характеризуемой коэффициентом 1,35 по уравнению:
где d1 — внутренний диаметр резьбы болта, мм.
1,35 * Р = (р *(d1)2 / 4) * ув, (52)
где [ур] — допускаемое напряжение на растяжение материала болта, МПа.
d1 = 1,31 * v Р / [ур], (53)
d1 = 1,31 * v 3750 / 1800 = 30 мм,
Следовательно, размеры фундаментного болта:
d = М24; h = 60 мм; Н = 200 мм;
L = 350 мм; b = 18 мм; А = 170 мм.
Рисунок 20 — Фундаментный болт:
1 — шпилька резьбовая;
2 — плита анкерная;
3 — шайба по ГОСТ11371 — 68;
4 — гайка по ГОСТ 5915 — 70.
Источник: https://studbooks.net/2448174/tehnika/vybor_elektrodvigatelya
Формула плеча силы
Рассмотрим рычаг с осью вращения находящийся в точке О. (рис.1). Силы ${\overline{F}}_1$ и ${\overline{F}}_2$, действующие на рычаг направлены в одну сторону.
Минимальное расстояние между точкой опоры (точка О) и прямой, вдоль которой действует на рычаг сила, называют плечом силы.
Для нахождения плеча силы следует из точки опоры опустить перпендикуляр к линии действия силы. Длинна данного перпендикуляра и станет плечом рассматриваемой силы. Так, на рис.1 расстояние $\left|OA\right|=d_1$- плечо силы $F_1$; $\left|OA\right|=d_2$- плечо силы $F_2$.
Рычаг находится в состоянии равновесия, если выполняется равенство:
\[\frac{F_1}{F_2}=\frac{d_2}{d_1}\left(1\right).\]
Предположим, что материальная точка движется по окружности (рис.2) под действием силы $\overline{F}$ (сила действует в плоскости движения точки). В таком случае угловое ускорение ($\varepsilon $) точки определяется тангенциальной составляющей ($F_{\tau }$) силы $\overline{F}$:
\[mR\varepsilon =F_{\tau }\left(2\right),\]
где $m$ — масса материальной точки; $R$ — радиус траектории движения точки; $F_{\tau }$ — проекция силы на направление скорости движения точки.
Если угол $\alpha $ — это угол между вектором силы $\overline{F}$ и радиус — вектором $\overline{R}$, определяющим положение рассматриваемой материальной точки (Этот радиус- вектор проведен из точки О в точку А на рис.2), тогда:
\[F_{\tau }=F{\sin \alpha \ \left(3\right).\ }\]
Расстояние $d$ между центром O и линией действия силы $\overline{F}$ называют плечом силы. Из рис.2 следует, что:
\[d=R{\sin \alpha \ \left(4\right).\ }\]
Если на точку будет действовать сила ($\overline{F}$), направленная по касательной к траектории ее движения, то плечо силы будет равно $d=R$, так как угол $\alpha $ станет равен $\frac{\pi }{2}$.
Момент силы и плечо
Понятие плечо силы иногда используют, для записи величины момента силы ($\overline{M}$), который равен:
\[\overline{M}=\left[\overline{r}\overline{F}\right]\left(5\right),\]
где $\overline{r}$ — радиус — вектор проведенный к точке продолжения силы$\ \overline{F}$. Модуль вектора момента силы равен:
\[M=F{r\sin \alpha =\ }Fd\ \left(6\right).\]
Построение плеча силы
И так, плечом силы называют длину перпендикуляра, который проводят из некоторой выбранной точки, иногда ее называют полюсом (выбираемой произвольно, но при рассмотрении одной задачи один раз).
При рассмотрении задач точку О выбирают обычно на пересечении нескольких сил) к силе (рис.3 (а)). Если точка О будет лежать на одной прямой с силами или на самой силе, то плечи сил будут равны нулю.
Если перпендикуляр не получается построить, то вектор силы продлевают в нужном направлении, после этого строят перпендикуляр (рис.3 (б)).
Примеры задач с решением
Пример 1
Задание. Какова масса меньшего тела ($m_1$), если его уравновешивает тело массой $m_2={\rm 2\ }$кг? Тела находятся на невесомом рычаге (рис.3) отношение плеч рычага 1:4?
Решение. Основой решения задачи является правило равновесия рычага:
\[\frac{F_1}{F_2}=\frac{d_2}{d_1}\left(1.1\right),\]
где силы, действующие на концы рычага равны по модулю силам тяжести, которые действуют на тела, следовательно, формулу (1.1) перепишем в виде:
\[\frac{m_1g}{m_2g}=\frac{d_2}{d_1}\to \frac{m_1}{m_2}=\frac{d_2}{d_1}\left(1.2\right).\]
Из выражения (1.2) получим искомую массу $m_1$:
\[m_1=\frac{m_2d_2}{d_1}.\]
Вычислим искомую массу:
\[m_1=2\cdot \frac{1}{4}=0,5\ (кг).\]
Ответ. $m_1=0,5\ кг$
Пример 2
Задание. Однородный стержень длинной $l\ $и массой $M$ расположен горизонтально. Один конец стержня в точке А закреплён так, что может вращаться вокруг этой точки, другой конец опирается на наклонную плоскость, угол наклона которой к горизонту равен $\alpha $. На стержне на расстоянии $b\ $от точки А лежит небольшой груз. Каковы плечи сил, действующих на стержень?
Решение. Изобразим на рис.4 силы, действующие на стержень. Это: сила тяжести: $M\overline{g}$, вес груза, расположенного на нем $\overline{P}=m_1\overline{g}$, сила реакции наклонной плоскости: $\overline{N}$; сила реакции опоры в точке A: $\overline{N}'$.
Плечи сил будем искать относительно точки A. Плечо силы $\overline{N'}$ будет равно нулю, так как сила приложена к стержню в точке А:
\[d_{N'}=0\ \left(2.1\right).\]
Плечо другой силы реакции опоры ($\overline{N}$) равно длине перпендикуляра AC:
\[d_N=l{\sin (90-\alpha )\ }=l{\cos \alpha \ \left(2.2\right).\ }\]
Плечо силы $M\overline{g}$ из рис.4 , так как сила тяжести приложена к центру масс стержня, который для однородного стержня находится на его середине:
\[d_{Mg}=\frac{l}{2}\left(2.3\right).\] Плечо силы $m_1\overline{g},$ учитывая, что груз маленький и принимая его за материальную точку, равно:
\[d_{m_1g}=b.\]
Ответ. $d_{N'}=0;;\ d_N=l{sin (90-\alpha )\ }=l{cos \alpha \ \left(м\right),\ }d_{Mg}=\frac{l}{2},\ d_{m_1g}=b$
Читать дальше: формула полезной мощности.
}_1$ и ${\overline{F}}_2$, дейÑÑвÑÑÑие на ÑÑÑаг напÑÐ°Ð²Ð»ÐµÐ½Ñ Ð² Ð¾Ð´Ð½Ñ ÑÑоÑонÑ.»,»word_count»:616,»direction»:»ltr»,»total_pages»:1,»rendered_pages»:1}
Источник: https://www.webmath.ru/poleznoe/fizika/fizika_137_formula_plecha_sily.php
Расчет рычага в механике
С правилом рычага мы знакомы еще с курса школьной физики. Правило рычага основано на законе сохранения энергии, который звучит следующим образом: полная механическая энергия замкнутой системы тел, между которыми действуют только консервативные силы, остаётся постоянной. Рассмотрим схему, показанную на рисунке:
На одном конце рычага, на расстоянии L1, расположен груз 1, создавая силу F1, на другом конце, на расстоянии L2, лежит груз 2, создавая силу F2.
Согласно закону сохранения энергии механическая энергия данной системы должна оставаться постоянной, т.е поэтому можно записать равенство:
где А — работа.
Приведенное равенство показывает, что рычаг будет находиться в равновесии, когда работа сил F1 и F2 будет равна.
Для данной системы работу А1 и А2 можно определить, используя зависимости:
Приравняв указанные зависимости, получим:
Таким образом силу F2 можно определить так:
В данной зависимости соотношение длин рычагов L1 и L2 называют передаточным числом (или передаточным отношением).
Показанный пример является самым простым видом рычага в механике, но другие, более сложные примеры, такие, как составной рычаг, основаны на тех же принципах и законах, что и обычный механический рычаг.
Расчет рычагов
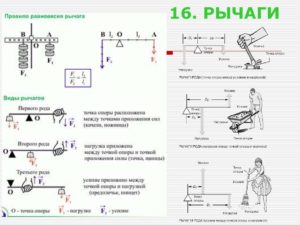
Рычаг представляет собой твердое тело с точкой опоры, находящейся под действием сил, расположенных в плоскости, проходящей через эту точку. Различают рычаг первого рода — «двуплечий рычаг» (а) и рычаг второго рода — «одноплечий рычаг» (б).
Интересное: Чем лечить молочницу в домашних условиях при беременности
а — двуплечий рычаг
б — одноплечий рычаг
Соотношение сил F1 и F2 определяется из условия равновесия рычага:
— без учета сил трения;
— с учетом сил трения, при направлении
вращения рычага показанного стрелкой ω;
при изменении направления вращения рычага
и наличии трения, соотношение F1 и F2 меняется.
Простые механизмы: рычаг, равновесие сил на рычаге
С самых давних пор человек применяет различные вспомогательные приспособления для облегчения своего труда. Как часто, когда нам надо сдвинуть с места очень тяжелый предмет, мы берем себе в помощники палку или шест. Это пример простого механизма – рычага.
Применение простых механизмов
Видов простых механизмов очень много. Это и рычаг, и блок, и клин, и многие другие. Простыми механизмами в физике называют приспособления, служащие для преобразования силы.
Наклонная плоскость, которая помогает вкатывать или втаскивать тяжелые предметы наверх – это тоже простой механизм. Применение простых механизмов очень распространено как в производстве, так и в быту.
Чаще всего простые механизмы применяют для того, чтобы получить выигрыш в силе, то есть увеличить в несколько раз силу, действующую на тело.
Рычаг в физике — простой механизм
Один из самых простых и распространенных механизмов, который изучают в физике еще в седьмом классе – рычаг. Рычагом в физике называют твердое тело, способное вращаться вокруг неподвижной опоры.
Различают два вида рычагов. У рычага первого рода точка опоры находится между линиями действия приложенных сил. У рычага второго рода точка опоры расположена по одну сторону от них.
То есть, если мы пытаемся при помощи лома сдвинуть с места тяжелый предмет, то рычаг первого рода – это ситуация, когда мы подкладываем брусок под лом, надавливая на свободный конец лома вниз. Неподвижной опорой у нас в данном случае будет являться брусок, а приложенные силы располагаются по обе стороны от него.
А рычаг второго рода – это когда мы, подсунув край лома под тяжесть, тянем лом вверх, пытаясь таким образом перевернуть предмет. Здесь точка опоры находится в месте упора лома о землю, а приложенные силы расположены по одну сторону от точки опоры.
Интересное: Низкая плацента что означает
Закон равновесия сил на рычаге
Используя рычаг, мы можем получить выигрыш в силе и поднять неподъемный голыми руками груз. Расстояние от точки опоры до точки приложения силы называют плечом силы. Причем, можно рассчитать равновесие сил на рычаге по следующей формуле:
где F1 и F2 – силы, действующие на рычаг,
а l2 и l1 – плечи этих сил.
Это и есть закон равновесия рычага, который гласит: рычаг находится в равновесии тогда, когда действующие на него силы обратно пропорциональны плечам этих сил.
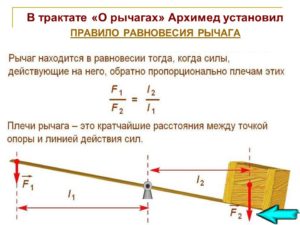
Этот закон был установлен Архимедом еще в третьем веке до нашей эры. Из него следует, что меньшей силой можно уравновесить большую. Для этого необходимо, чтобы плечо меньшей силы было больше плеча большей силы.
А выигрыш в силе, получаемый с помощью рычага, определяется отношением плеч приложенных сил.
Начав использоваться с глубокой древности, рычаг повсеместно применяется и в наши дни, как на производстве, например, подъемные краны, так и в быту, например, ножницы, весы и так далее.
Источники: http://www.hydro-pnevmo.ru/topic.php?ID=8http://www.tyz.uu.ru/misc/raschet_richaga.htmlhttp://www.nado5.ru/e-book/prostye-mekhanizmy-rychag
Источник: https://rojaismelo.ru/lechenie-detej/raschet-rychaga-v-mehanike
Простые механизмы. Рычаги. Момент силы. Физика. 7 класс. — Объяснение нового материала
Объяснение нового материала. Простые механизмы. Рычаги. Момент силы.
В современной технике для переноса грузов на стройках и предприятиях широко используются грузоподъемные механизмы, незаменимыми составными частями которых можно назвать простые механизмы.
Среди них древнейшие изобретения человечества: блок и рычаг.
Древнегреческий ученый Архимед облегчил труд человека, дав ему при использовании своего изобретения выигрыш в силе, и научил менять направление действия силы.
Блок — это колесо с желобом по окружности для каната или цепи, ось которого жестко прикреплена к стене или потолочной балке. Грузоподъемные устройства обычно используют не один, а несколько блоков. Система блоков и тросов, предназначенная для повышения грузоподъемности, называется полиспаст.
Подвижный и неподвижный блок — такие же древнейшие простые механизмы, как и рычаг. Уже в 212 г.до н.эры с помощью крюков и захватов, соединенных с блоками, сиракузцы захватывали у римлян средства осады. Сооружением военных машин и обороной города руководил Архимед.
Неподвижный блок Архимед рассматривал как равноплечий рычаг. Момент силы, действующей с одной стороны блока, равен моменту силы, приложенной с другой стороны блока. Одинаковы и силы, создающие эти моменты.
Выигрыш в силе при этом отсутствует, но такой блок позволяет изменить направление действия силы, что иногда необходимо.
Подвижный блок Архимед принимал за неравноплечий рычаг, дающий выигрыш в силе в 2 раза. Относительно центра вращения действуют моменты сил, которые при равновесии должны быть равны.Архимед изучил механические свойства подвижного блока и применил его на практике.
По свидетельству Афинея, «для спуска на воду исполинского корабля, построенного сиракузским тираном Гиероном, придумывали много способов, но механик Архимед, применив простые механизмы, один сумел сдвинуть корабль с помощью немногих людей.
Архимед придумал блок и посредством него спустил на воду громадный корабль».
Блок не дает выигрыша в работе, подтверждая «золотое правило» механики. В этом легко убедиться, обратив внимание на расстояния, пройденные рукой и гирей.
Спортивные парусные суда, как и парусники прошлого, не могут обойтись без блоков при постановке парусов и управлении ими. Современным судам нужны блоки для подъема сигналов, шлюпок.
Эта комбинация подвижных и неподвижных блоков на линии электрофицированной железной дороги для регулировки натяжения проводов.
Такой системой блоков могут пользоваться планеристы для подъема в воздух своих аппаратов.
ВОРОТ
Это два колеса, соединенные вместе и вращающиеся вокруг одной оси, например, колодезный ворот с ручкой.
Такое сложное громоздкое устройство средневекового периода — ворот или ступальные колеса широко использовались в рудничном деле. Их приводили в движение люди, ступая по планкам колеса.
Ворот можно рассматривать как неравноплечий рычаг: выигрыш в силе, даваемый им, зависит от соотношения радиусов R и r.ЛЕБЁДКА
Лебедка — конструкция , состоящая из двух воротов с промежуточными передачами в механизме привода.
Грузоподъемность современных лебедок может быть свыше 100 кН. Они работают на канатных дорогах, на буровых установках, выполняют строительно-монтажные и погрузочно-разгрузочные работы.
Лебедка с двигателем внутреннего сгорания.
Электрическая передвижная лебедка.
ЗУБЧАТАЯ ПЕРЕДАЧА
— система находящихся в зацеплении зубчатых колес ( шестеренок) в какой-то мере аналогична вороту.
НАКЛОННАЯ ПЛОСКОСТЬ
Наклонная плоскость применяется для перемещения тяжелых предметов на более высокий уровень без их непосредственного поднятия. К таким устройствам относятся пандусы, эскалаторы, обычные лестницы и конвейеры.
Если нужно поднять груз на высоту, всегда легче воспользоваться пологим подъемом, чем крутым. Причем, чем положе уклон, тем легче выполнить эту работу. Когда время и расстояние не имеют большого значения , а важно поднять груз с наименьшим усилием, наклонная плоскость оказывается незаменима.
С помощью этих рисунков можно объяснить, как работает простой механизм НАКЛОННАЯ ПЛОСКОСТЬ.
Классические расчеты действия наклонной плоскости и других простых механизмов принадлежат выдающемуся античному механику Архимеду из Сиракуз.
При строительстве храмов египтяне транспортировали, поднимали и устанавливали колоссальные обелиски и статуи, вес которых составлял десятки и сотни тонн! Все это можно было сделать, используя среди других простых механизмов наклонную плоскость. Главным подъемным приспособлением египтян была наклонная плоскость — рампа.
Остов рампы, то есть ее боковые стороны и перегородки, на небольшом расстоянии друг от друга пересекавшие рампу, строились из кирпича; пустоты заполнялись тростником и ветвями. По мере роста пирамиды рампа надстраивалась. По этим рампам камни тащили на салазках таким же образом, как и по земле, помогая себе при этом рычагами.
Угол наклона рампы был очень незначительным — 5 или 6 градусов.
Колонны древнего египетского храма в Фивах.
Каждую из этих огромных колонн рабы втаскивали по рампе- наклонной плоскости. Когда колонна вползала в яму, через лаз выгребали песок, а затем разбирали кирпичную стенку и убирали насыпь. Таким образом, например, наклонная дорога к пирамиде Хафра при высоте подъема в 46 метров имела длину около полукилометра.
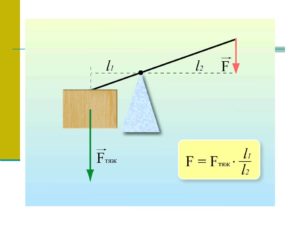
«Тело на наклонной плоскости удерживается силой, которая … по величине во столько раз меньше веса этого тела, во сколько раз длина наклонной плоскости больше ее высоты».
Это условие равновесия сил на наклонной плоскости сформулировал голландский ученый Симон Стевин (1548-1620).
Рисунок на титульном листе книги С. Стевина, которым он подтверждает свою формулировку.
Очень остроумно использована наклонная плоскость на Красноярской ГЭС. Здесь вместо шлюзов действует судовозная камера, движущаяся по наклонной эстакаде. Для ее передвижения необходимо тяговое усилие в 4000 кН.А почему горные дороги вьются пологим «серпантином»?
КЛИН
Клин — одна из разновидностей простого механизма под названием «наклонная плоскость». Клин состоит из двух наклонных плоскостей, основания которых соприкасаются. Его применяют, чтобы получить выигрыш в силе, то есть при помощи меньшей силы противодействовать большей силе. При рубке дров, чтобы облегчить работу, в трещину полена вставляют металлический клин и бьют по нему обухом топора.
Идеальный выигрыш в силе, даваемый клином, равен отношению его длины к толщине на тупом конце .Из-за большого трения его КПД столь мал, что идеальный выигрыш не имеет особого значения.
ВИНТ
Другой разновидностью наклонной плоскости является винт. Винт — наклонная плоскость, навитая на ось. Резьба винта – это наклонная плоскость, многократно обернутая вокруг цилиндра.
Идеальный выигрыш в силе, даваемый клином, равен отношению его длины к толщине на тупом конце. Реальный выигрыш клина определить трудно. Из-за большого трения его КПД столь мал, что идеальный выигрыш не имеет особого значения.
В зависимости от направления подъема наклонной плоскости винтовая резьба может быть левой или правой.
Примеры простых устройств с винтовой резьбой – домкрат, болт с гайкой, микрометр, тиски.
Момент силы
Условием равновесия рычага F1/F2 = l2/l1 можно пользоваться, если к рычагу приложены только две силы.
А каково условие равновесия рычага в случае, когда к рычагу приложено несколько сил?
Чтобы найти это условие, перепишем равенство F1/F2 = l2/l1 в виде F1l1 = F2l2. Теперь величины, характеризующие силу, стремящуюся вращать рычаг в одном направлении, находятся в одной части равенства, а величины, характеризующие силу, стремящуюся вращать рычаг в противоположном направлении, — в другой части равенства.
Произведение модуля силы на ее плечо называют моментом силы: М = FI. Момент первой силы M1 = F1l1 а момент второй силы М2 = F2l2. Поэтому условие F1l1 = F2l2 можно переписать теперь в виде М1 = М2.
С использованием понятия момента силы условие равновесия рычага можно сформулировать так: рычаг находится в равновесии, если момент силы, стремящейся вращать рычаг в одном направлении, равен моменту силы, стремящейся вращать его в противоположном направлении.Опыт и расчет показывают, что это справедливо и тогда, когда к рычагу приложено несколько сил: рычаг находится в равновесии, если сумма моментов сил, стремящихся вращать рычаг в одном направлении, равна сумме моментов сил, стремящихся вращать его в противоположном направлении.
Условие равновесия рычага в таком виде называют правилом моментов. Приведем пример использования этого правила.
Решим задачу
Какой массы груз надо подвесить в точке А (рис. 25.5, а), чтобы рычаг находился в равновесии? Масса каждого груза равна 100 г, расстояние между соседними штрихами на рычаге равно 10 см.
Рис. 25.5. К решению задачи
Ответ: 0,4 кг.
Домашнее задание
Задание 1. Ответь на вопросы.
- Что такое рычаг? Приведите примеры рычага.
- Что такое плечо силы?
- Сформулируйте условие равновесия рычага.
- Как с помощью рычага получить выигрыш в пути? Приведите примеры такого использования рычага.
- Что такое момент силы? Сформулируйте правило моментов.
Задание 2. Реши ребус.
К занятию прикреплен файл «!». Вы можете скачать файл в любое удобное для вас время.
Использованные источники: http://www.tepka.ru/fizika_7 , http://class-fizika.narod.ru
Источник: https://www.kursoteka.ru/course/2755/lesson

